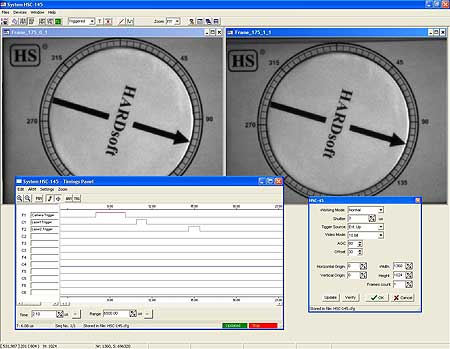
Charakterystyczną cechą systemu jest możliwość wykonania pary zdjęć z bardzo krótkim odstępem czasowym. Minimalny czas między zdjęciami wynosi 500ns. Czas integracji dla pierwszego zdjęcia można ustawić w zakresie od 1us do 100ms. Czas integracji drugiego zdjęcia jest stały i wynosi 90ms. Proces wykonania pary zdjęć jest inicjowany impulsem TTL podanym na wejście Trigger kamery. Wybrane zbocze impulsu trigger rozpoczyna proces naświetlania pierwszego zdjęcia z zadanym czasem integracji. Po zadanym czasie integracji jest naświetlane drugie zdjęcie. W czasie integracji drugiego obrazu jest wysyłany do PC pierwszy obraz. Po zakończeniu drugiej integracji jest wysyłany do PC drugi obraz.
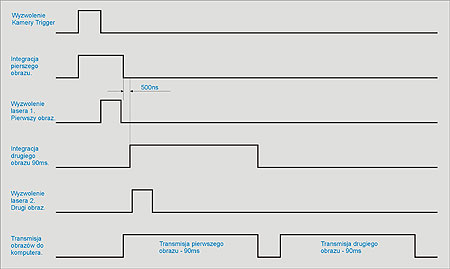
Pomiary muszą być wykonywane w pomieszczeniu zaciemnionym, natomiast obiekt jest oświetlany krótkimi impulsami lasera. Pierwszy laser oświetla obiekt w czasie integracji pierwszego obrazu, a drugi laser oświetla obiekt w czasie integracji drugiego obrazu. Taki sposób i warunki pracy kamery powodują, że lasery określają czas naświetlania obrazów i odstęp czasu między zdjęciami. Do synchronizacji pracy laserów i kamery jest wykorzystany sequencer. Jest to szesnastokanałowy, programowany generator impulsów, który może wygenerować złożone sekwencje impulsów w szesnastu niezależnych kanałach. Czas trwania impulsu, odstęp czasowy między impulsami i wybór kanału są ustawiane programowo w prosty sposób.
Wymagania stawiane kamerze, która pracuje w systemie pomiarów przepływu metodą PIV powodują, że sensor pracuje w nietypowych warunkach. Bardzo ważnym parametrem jest poziom szumów kamery. Zbyt duży poziom szumów kamery ma negatywny wpływ na wyniki obliczeń korelacji pary obrazów.
Parametry kamery można znacznie poprawić stosując układ chłodzenia sensora. Schłodzenie sensora do -20°C powoduje znaczne zmniejszenie szumów i zwiększenie czułości kamery.
W układzie chłodzącym sensor kamery zastosowano dwustopniowy układ chłodzenia oparty na dwóch elementach Peltier'a.
|